


Todos os Produtos
-
Cilindro bonde servo
-
Cilindro bonde linear
-
atuador servo linear
-
Cilindro bonde resistente
-
máquina servo da imprensa
-
imprensa conduzida servo
-
Imprensa elétrica servo
-
linha central do robô 7
-
trilha linear do robô
-
sistema ferroviário do robô
-
Cadeia de fabricação do motor
-
Unidade de movimentação linear
-
Unidade da cremalheira e do pinhão
-
Máquinas feitas alemãs do CNC
-
Eixos do parafuso da bola
Pessoa de Contato :
Fiona Luo
Número de telefone :
+86 18013106371
Whatsapp :
+8618000732351
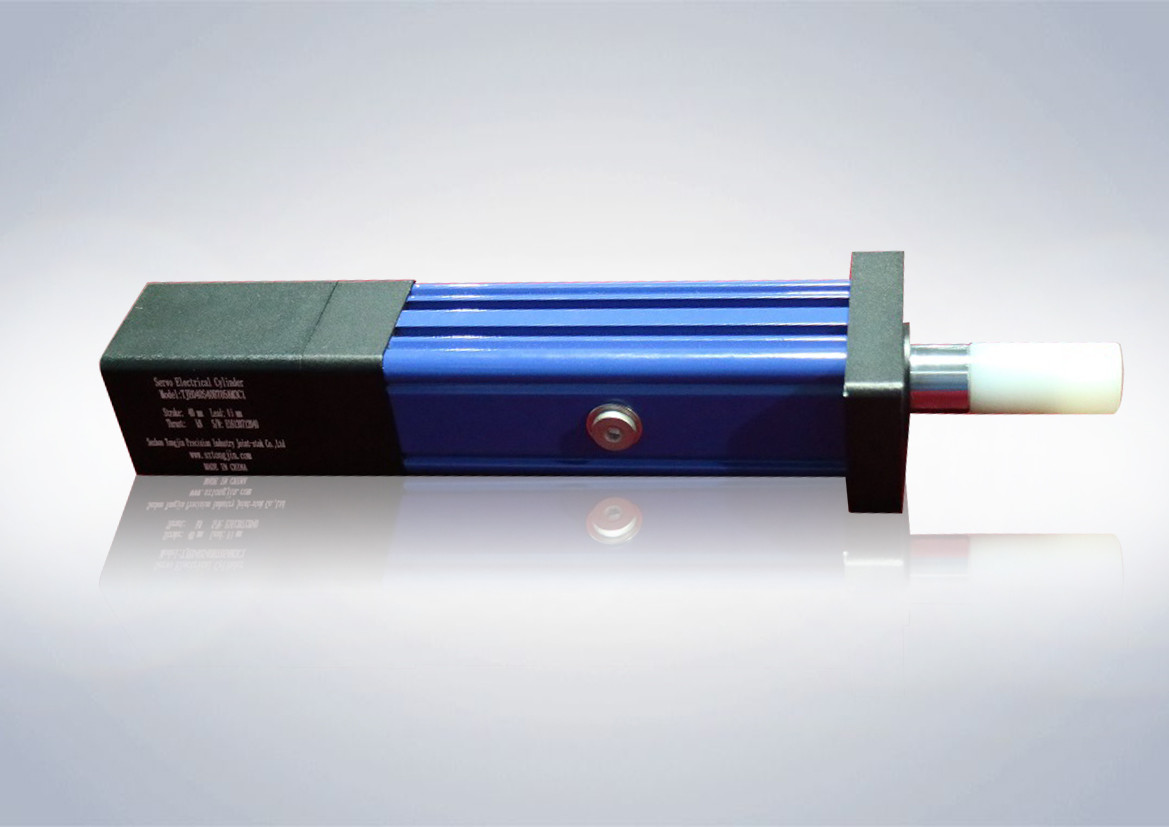
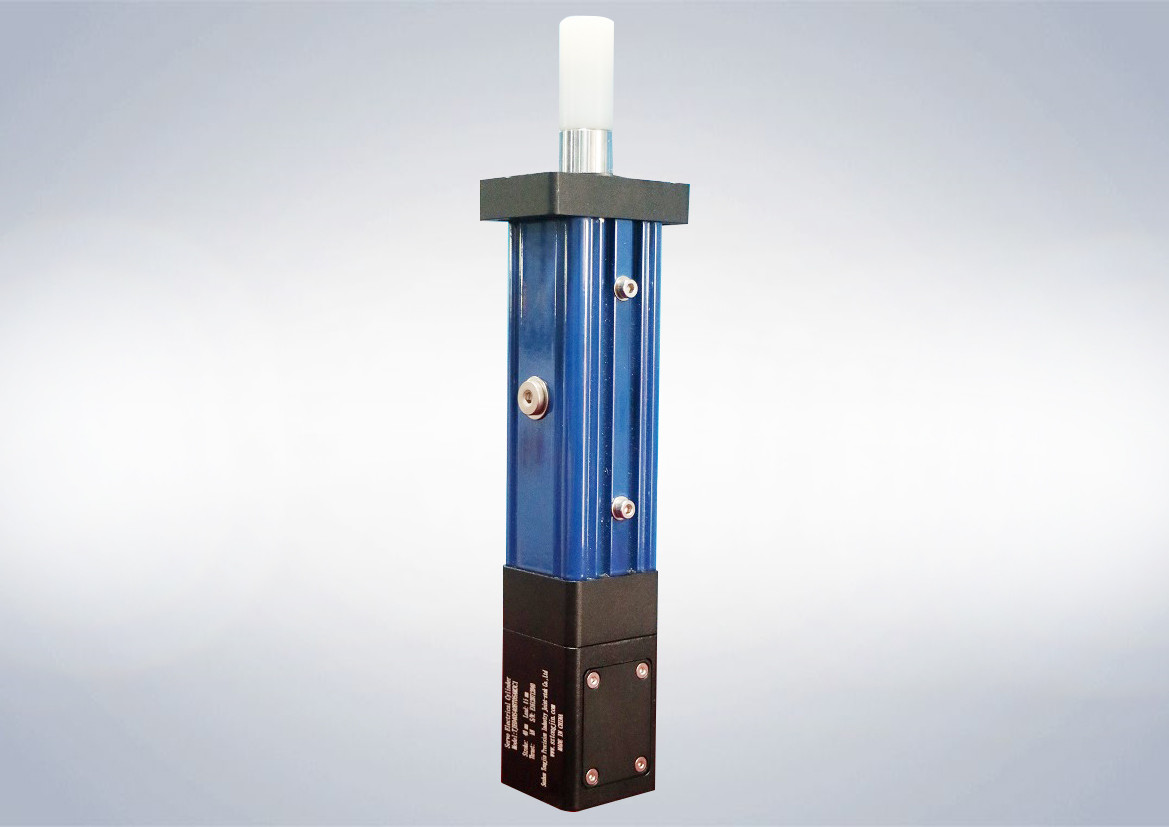
micro cilindro bonde servo da estrutura 220V compacta para o ajuste de altura de Seat







| Lugar de origem | China |
|---|---|
| Marca | TJ |
| Certificação | ISO9001:2008,CE |
| Número do modelo | TJE040 |
| Quantidade de ordem mínima | 1 pcs |
| Preço | negotiable |
| Detalhes da embalagem | embalagem externo: caixa ou caixa não de madeira; embalagem do coxim: Espuma de EPE |
| Tempo de entrega | 3-4 semanas |
| Termos de pagamento | T/T, pagamento de 30% adiantado, 70% antes da entrega |
| Habilidade da fonte | 800 pcs por mês |

Contacte-me para amostras grátis e vales.
Whatsapp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
Se você tem algum interesse, nós fornecemos a ajuda online de 24 horas.
xDetalhes do produto
| Material | De alumínio | Cor | padrão: o blue&silvery da marinha, outro pode ser personalizado |
|---|---|---|---|
| Velocidade | até 200mm/s | Repetibilidade | ±0.01mm |
| Curso | 50~200mm | Força da saída | até 0.65KN |
| tipo de conexão do motor | linear/paralela | anti-rotação interna | Com/sem |
| LIGAÇÃO DO PARAFUSO | 4mm | tipo de conexão da carga | masculino, fêmea, U-parafuso, dobradiça principal da bola e personalizado |
| Realçar | Atuadores elétricos do cilindro do ajuste de altura de Seat,Atuador servo linear da estrutura compacta,Micro cilindro elétrico servo |
||
Descrição de produto
Mini cilindro bonde servo da estrutura compacta com software exclusivo, 50~200mm atuador linear, 9001:2008 do ISO
1. Princípio da operação
O cilindro bonde é um movimento linear que converta o movimento de gerencio do motor no pushrod com o movimento de gerencio do parafuso e dos pares do parafuso.
Usando o controle de circuito fechado característico do servo motor, o controle da precisão da pressão, a velocidade e a posição podem ser realizados convenientemente, e o programa pode ser realizado usando a tecnologia moderna do controle de movimento, a tecnologia do controle numérico e a tecnologia do ônibus (rede). Devido a seus controle e conveniência, pode realizar o controle de movimento da precisão que o cilindro e a movimentação do cilindro hidráulico não podem realizar.
2. Definição modelo do produto
Exemplo: TJE075 S100 B R 05 A M.C 2 P11 O/C N/P
|
TJE075-Series não.
TJE040: 44×44mm TJE065: 64×64mm TJE075: 75×75mm TJE095: 93×93mm TJE110: 111×111mm TJE135: 134×134mm |
Curso de S100-Effective
TJE040: 50-200mm TJE065: 50-250mm TJE075: 50-600mm TJE095: 50-800mm TJE110: 50-1000mm TJE135: 50-1200mm |
|
Tipo do B-parafuso
A: Parafuso do Acme B: Parafuso da bola C: Parafuso do rolo |
R-Anti-rotação
R: Com T: Sem (TJE040 sempre sem esta função) |
|
ligação 05-Screw
TJE040: 4mm TJE065: 4, 5, 10, 16,20mm TJE075: 4, 5, 10, 20, 40mm TJE095: 4, 5, 6, 8, 10, 25mm TJE110: 5, 6, 8, 10, 20, 32mm TJE135: 10, 20, 50mm |
Tipo da montagem do Um-motor
B: Paralela |
|
Tipo da montagem do M-cilindro
M1: Montagem lateral dobro M2: Montagem lateral do turnnion M3: Montagem dianteira da flange M4: Montagem traseira da flange M5: Montagem traseira da braçadeira M6: Montagem do eixo traseiro MX: Personalizado |
C — tipo de conexão da carga
C1: Homem C2: Fêmea C3: U-parafuso C4: Dobradiça principal da bola CX: Personalizado |
|
2-Number de interruptores de limite
(O defeito é interruptor normalmente aberto de NPN) |
Interruptores de O/C-Limit
O: Normalmente aberto C: Normalmente fim |
|
Tipo de N/P-Sensing
N: NPN P: PNP |
| Régua + sensor grating da força |
|
Sensor da força: ① 4-20mA ② 0-10V Régua grating: ① TTL 24V ② RS422 (diferença 5V) |
|
Se falta da peça, significa sem a régua de raspagem ou o sensor da força. P01: Somente com régua grating TTL (24V) P10: Somente com régua grating 4-20mA |
Mark:
1) A fim assegurar o curso eficaz, duas extremidades precisam de ser espaço reservado de 5mm.
2) O sensor não poderia ser montado no mesmo lado do motor quando o motor está paralelo montado.
2. Torque servo bonde da movimentação do cilindro e
tabela da seleção do poder
| Conexão do motor | Paralela (movimentação de correia) | ||||||||
| Relação de redução | 1 | 1,5 | 3 | 5 | |||||
| Ligação do parafuso | [milímetro] | 4 | |||||||
| Poder do motor | [Quilowatt] | 01 | 0,15 | 0,1 | 0,15 | 0,1 | 0,15 | 0,1 | 0,15 |
| Torque avaliado do motor | [N.M] | 0,32 | 0,48 | 0,32 | 0,48 | 0,32 | 0,48 | 0,32 | 0,48 |
| Velocidade avaliado do motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Força avaliado do cilindro | [KN] | 0,45 | 0,65 | 0,65 | 0,65 | 0,65 | 0,65 | 0,65 | 0,65 |
| Cilindro Máximo Força | [KN] | 0,65 | |||||||
| Velocidade do cilindro | [mm/s] | 0-200 | 0-130 | 0-65 | 0-40 | ||||
| Tabela servo elétrica da seleção do torque e do poder da movimentação do cilindro da série TJE040 | |||||||||
| Conexão do motor | Linear (movimentação direta de acoplamento) | ||||||||
| Relação de redução | 1 | 1,5 | 3 | 5 | |||||
| Ligação do parafuso | [milímetro] | 4 | |||||||
| Poder do motor | [Quilowatt] | 01 | 0,15 | 0,1 | 0,15 | 0,1 | 0,15 | 0,1 | 0,15 |
| Torque avaliado do motor | [N.M] | 0,32 | 0,48 | 0,32 | 0,48 | 0,32 | 0,48 | 0,32 | 0,48 |
| Velocidade avaliado do motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Força avaliado do cilindro | [KN] | 0,45 | 0,65 | 0,65 | 0,65 | 0,65 | 0,65 | 0,65 | 0,65 |
| Cilindro Máximo Força | [KN] | 0,65 | |||||||
| Velocidade do cilindro | [mm/s] | 0-200 | 0-130 | 0-65 | 0-40 | ||||
3. Aplicações
Equipamento militar do ★: radar, instalador do míssil, plataforma do balanço do veículo blindado, equipamento especial e os outros navios de guerra e portal de aviões, a abertura, o ajuste de altura do assento, o sistema de rastreio da arma, o atuador, apoio de levantamento experimental, ajuste da ação do sentido do alto e baixo da artilharia do tanque, o impulso do combustível de foguete, a abertura da porta da fornalha, etc.
Equipamento especial do ★: a linha de produção da automatização industrial, a cadeia de fabricação, a transmissão da logística, a plataforma de levantamento, o controle deslocado, o controle da válvula, o manipulador coordenado, a faca do CT Kama do equipamento mecânico, o alimento e a indústria da medicina, máquina-ferramenta, máquina de empacotamento da indústria, imprensa eletrônica automotivo, índice da máquina de enrolamento do equipamento de matéria têxtil, morrem controle de posição, apertando, furar, posicionando.
Equipamento experimental do ★: Plataforma da simulação, banco de ensaio, máquina da onda, equipamento de testes etc.
Este tipo é especialmente apropriado para:
indústria de serviço de alimentação (comparada com o cilindro cylinder&pneumatic hidráulico, é muito clenaner).
4. Por que nos escolha?
| estrutura 1.Compact e dimensão pequena. |
| rigidez 2.High, baixo inertness e resposta rápida. |
| confiança 3.High e vida de funcionamento longa. |
| 4. Ruído &less de poupança de energia. |
| conjunto 5.Convenient e uso, manutenção simples. |
| anos 6.One de controle de qualidade, serviço de manutenção de vida. |
Produtos recomendados
-
VIDEO

-